Read the motif.
Score the far zone.
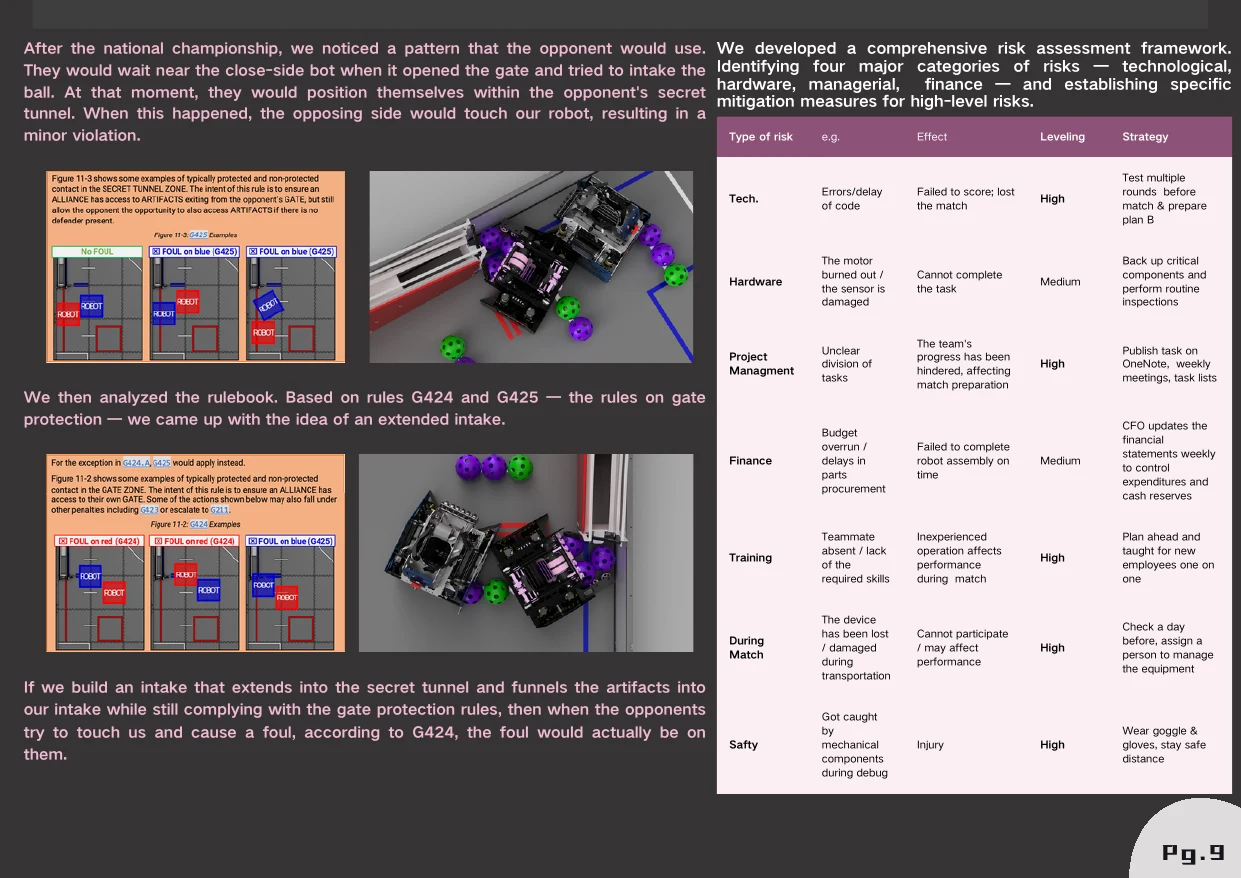
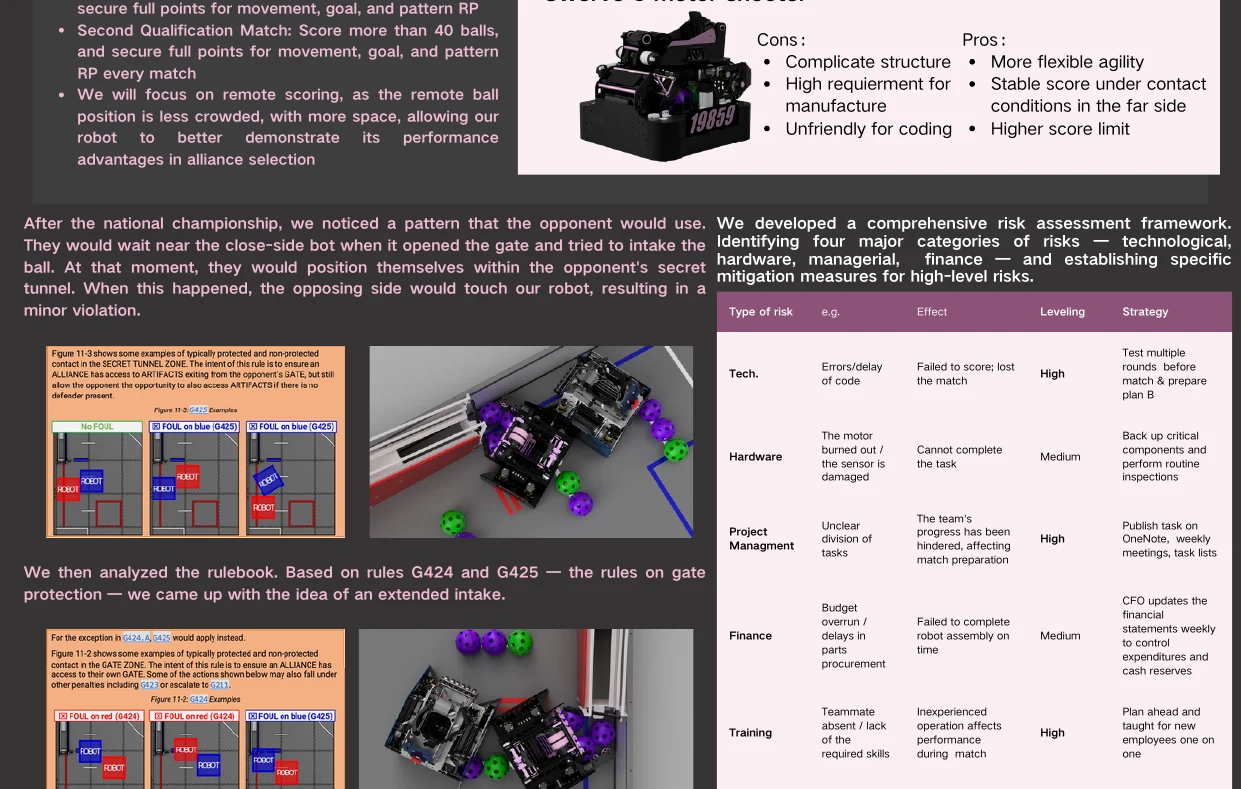
An archaeology-themed game of artifacts, patterns, and a randomized obelisk to decode. Here is the game — and the strategy that took us to a regional championship.
How DECODE
is played.
Two alliances of two teams each score purple and green artifacts — ball-shaped game pieces — into their goal, and build patterns on their ramp that match a randomized motif. The match opens with a 30-second autonomous period, where robots read the obelisk and AprilTags to decode the match motif, then continues into driver-controlled play.
A motif is a sequence of three artifact colours — two purple, one green — in one of three orders. Robots hold up to three artifacts at a time, unlock gates to release overflow artifacts back onto the field, and race back to base in the endgame for bonus points.
Three motifs · GPP · PGP · PPG — orientation set by field staff at random.
Where the points are.
Approximate values — always confirm against the current official manual.
Built to own the far zone.
Why we play
the far zone.
A great engineer decides why before how. After studying the rules and scoring, we compared two chassis strategies: a Mecanum proximal build focused on quick near-goal cycles, and a Vector swerve far-zone fixed-turret build. Weighing task coverage, tactical flexibility, structural complexity, and development time — we chose Mecanum: higher agility, faster build cycle, and lower mechanical risk for a tight competition calendar.
The Vector swerve path promised maximum field coverage but demanded precision machining and months of control tuning. Mecanum lets us focus engineering time on the turret and software — where our competitive edge lives. With a dual-motor turret covering 5°–35° pitch and auto-aim, we can score reliably from mid-field without the swerve overhead.
Every choice, weighed.
| Module | Option | Advantage | Trade-off | Votes |
|---|---|---|---|---|
| Drivebase | Mecanum ★ | Omnidirectional, high agility, lower build complexity | Some movement loss, drift at speed — managed in software | 10 |
| Vector swerve | Low energy loss, high push force, full-field range | High machining precision, months of control tuning | 5 | |
| Intake | Active roller | Fast pickup, can suck in, motor headroom | More motors, can jam, needs alignment | 13 |
| Passive scoop | Zero motors, dead simple, low failure | Slow, relies on chassis push, no stacking | 2 | |
| Shooter | Catapult | Fast launch, energy-efficient | Complex storage, needs reset time | 6 |
| High-speed thrower | Adjustable angle/power, strong rapid-fire, stable arc | High power draw, precise roller gap | 9 |
What we're aiming for.
Plan for what can break.
| Type | Risk | Level | Mitigation |
|---|---|---|---|
| Technical | Program crash or lag in a match | High | Multi-round pre-match testing; manual control backup |
| Hardware | Motor burnout or sensor failure | Medium | Spare critical parts; routine inspection |
| Project mgmt | Unclear ownership, schedule slip | High | Gantt + OneNote shared board; weekly stand-ups |
| Finance | Budget overrun or part delays | Medium | CFO updates the budget weekly; control spend & stock |
| Training | Member absence or skill gaps | High | Scheduled practice; teaching videos for newcomers |
| Logistics | Equipment lost or damaged in transit | High | Pack-out checklist; one person owns transport |
| Safety | Mechanism pinch during tuning | High | Gloves & goggles; keep a safe distance |