Built to dominate
from anywhere.
A 4-wheel Mecanum drive with a dual-motor auto-aiming turret — evolved through swerve prototypes into a machine that launches triple-shots in 0.3 s and scores from full-field range. Explore the CAD in 3D.
The
machine.
19859 · 2025–2026 competition robot
Mecanum V3
drive.
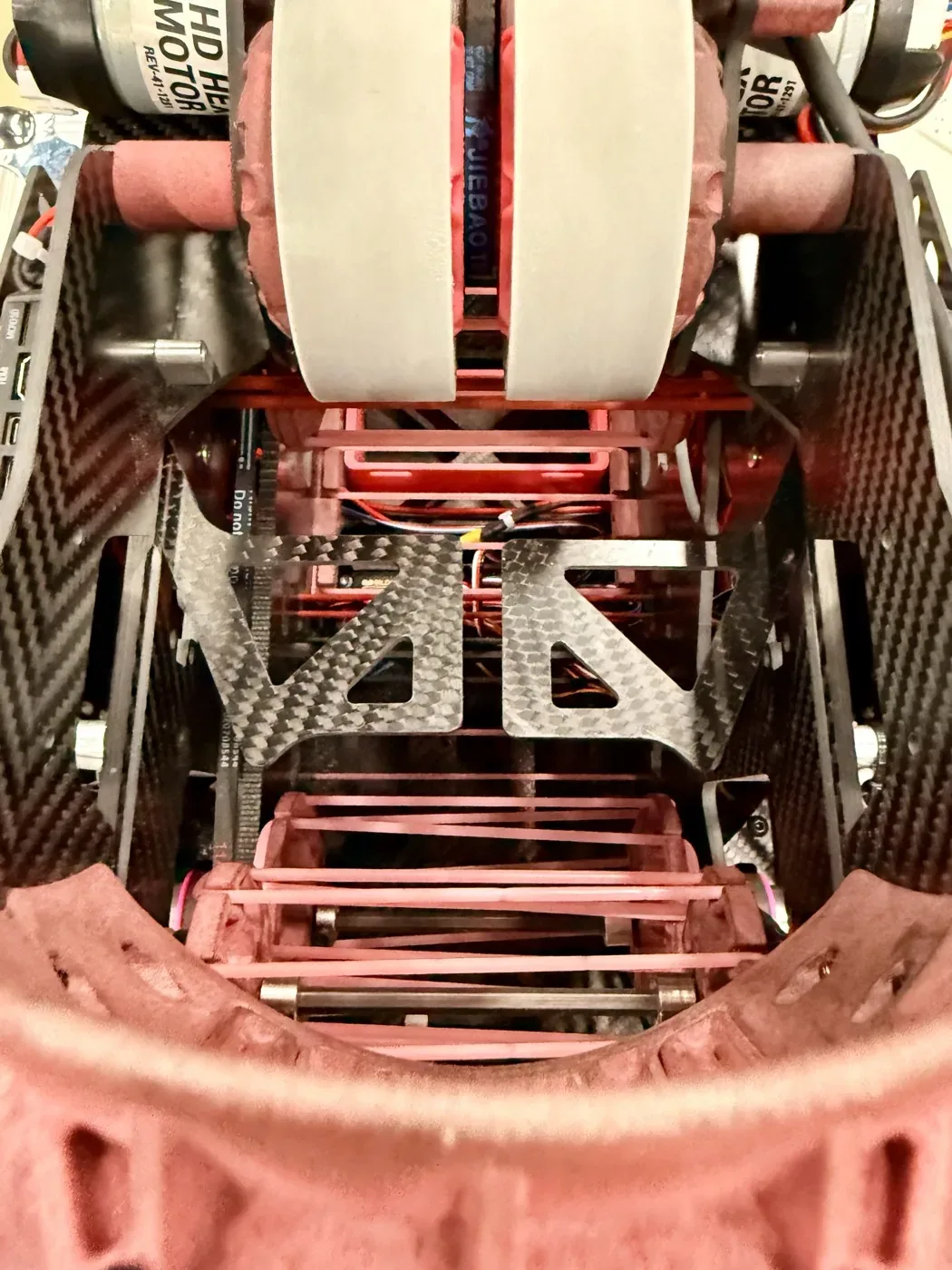
After two swerve prototypes proved the concept and pushed our engineering limits, Prototype V3 made a decisive pivot: 4-wheel Mecanum drive. Low voltage, easy to tune, precise power output — and it lets us drive PedroPathing's native Mecanum follower directly, eliminating the custom drivetrain layer entirely.
Six VEX PRO Mecanum wheels (four drive + two intake) with a GoBilda Pinpoint odometry pod give sub-centimetre field-centric positioning. The chassis became a platform for near-field dominance — fast repositioning, reliable intake alignment, and shooter stability, match after match.
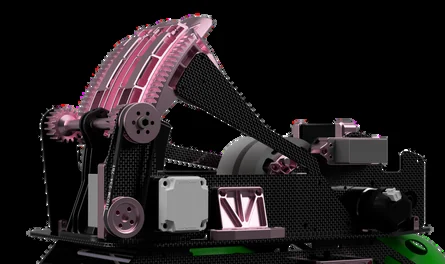
Dual-motor
turret.
Ultra-high torque delivers launch RPM within 0.5 seconds of startup. Our specially designed linkage method minimises the turret's length and width to the absolute smallest dimensions, maximising the reduction of the turret's moment of inertia — enabling silky-smooth turret rotation, and a smaller gear ratio that makes near-field shots more stable.
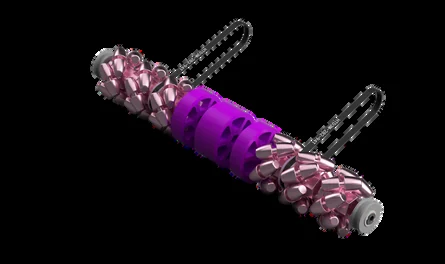
To keep flywheel speed stable through rapid triple-shots, we embedded twelve 10 mm copper beads as an internal counterweight — adding inertia without changing the envelope. The turret gate's dual X25 servos prevent the intake from over-feeding and jamming the flywheel, while a GoBilda RGB light makes machine state visible at a glance.
Built to be unmistakable.
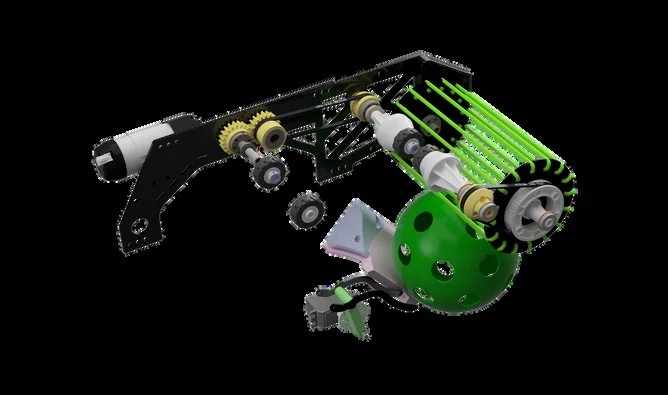
Every part earns its place.
A quick-release side intake that can be re-pinned before matches based on the assigned alliance. The herringbone ball path with a full rubber-band drum roller ensures stable collection. Steel plate reinforcement enhances survivability after collisions.
Two X25 25 kg servos gate the ball path into the turret preventing balls from being drawn into the launcher too rapidly, causing flywheel lockup. A GoBilda RGB indicator makes robot state readable at a glance on the field.
Static was randomly disconnecting our control hub mid-match. Inspired by a Jingdezhen ceramics outreach trip, we machined ceramic shims that block static conduction without blocking signal — a perfect fusion of craft and engineering.
Proud failures that
made us better.
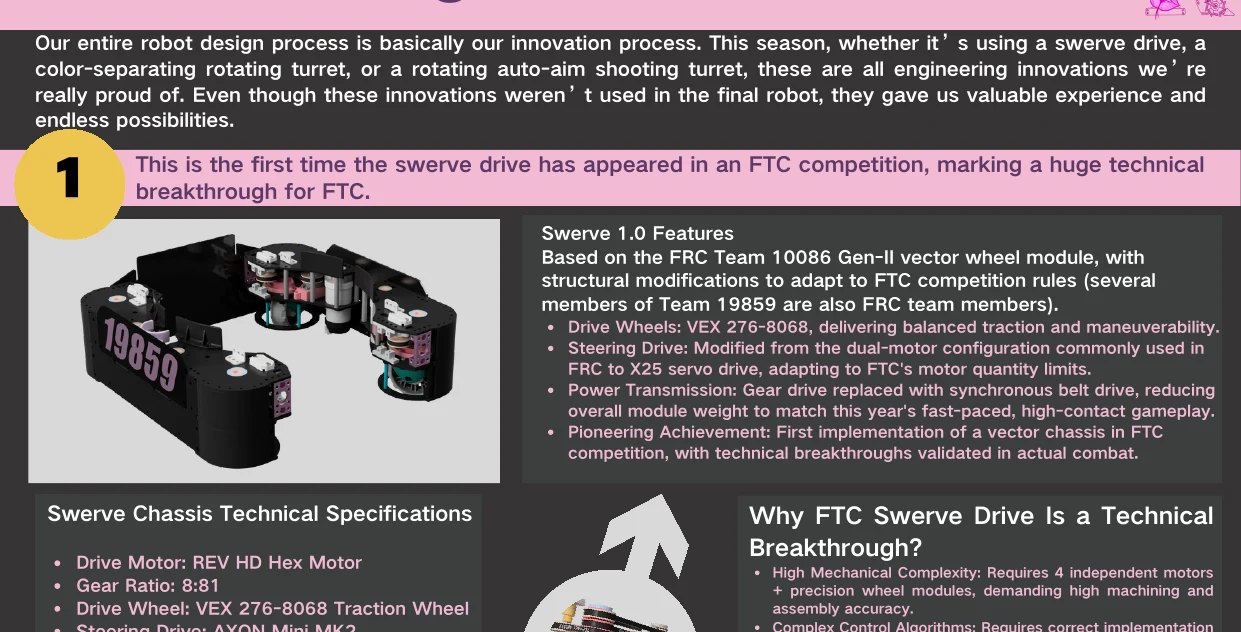
Our entire robot design process is our innovation process. Whether it's a swerve drive, a colour-separating rotating turret, or a rotating auto-aim shooting turret — these innovations weren't in the final robot, but they gave us invaluable experience and endless possibilities.
Based on FRC Team 10086 Gen-II vector wheel module with structural modifications for FTC rules. X25 servo steering, synchronous belt drive, VEX 276-8068 wheels. The pioneering achievement: first implementation of a vector chassis in FTC competition, technically validated in actual combat.
Three REV HD Hex motors for maximum launch throughput. Chassis-based auto-aim with Limelight backup lets the robot fire before contact happens. Full-field localisation — the moment we're in position, we shoot. Auto-aim locks within 0.3 s, target RPM within 0.4 s.
We don't guess.
We measure.
Every change starts from a real problem or a clear performance target — never change for change's sake. No design changes sourced from imaginaton alone. All recent data and validation controlled within 3–5 days per cycle.
Chassis evolution
First swerve chassis in FTC competition. Proved holonomic full-field motion. Complex inverse kinematics, high assembly precision requirement — steep learning curve.
Four-module independent PID for per-module friction/backlash differences. Upgraded steering from MA3 encoder to built-in servo feedback — eliminated wheel vibration at switching-point angles.
Strategic pivot to 4-wheel Mecanum: low voltage, easy to tune, precise power output. Drives PedroPathing's native Mecanum follower directly — no custom drivetrain layer. Blazing fire rate and near-field dominance.
Flywheel & intake
RPM dropped noticeably after each shot — second and third balls drifted further out. The first artifact hit the correct point, the next two progressively missed. Inertia was the culprit.
Embedded 12× 10 mm copper beads (56 g) in the flex-wheel gaps via 3D-printed inserts. Triple-shot rotational stability improved significantly — structure unchanged.
Too narrow for corner artifacts. Elastic bands caused too much kickback during testing. Limited auto-period ceiling.
Quick-release side intake repinnable per alliance. Dual Mecanum wheels for smooth autonomous intake. Steel plate reinforcement. G424 gate protection against flywheel jam.

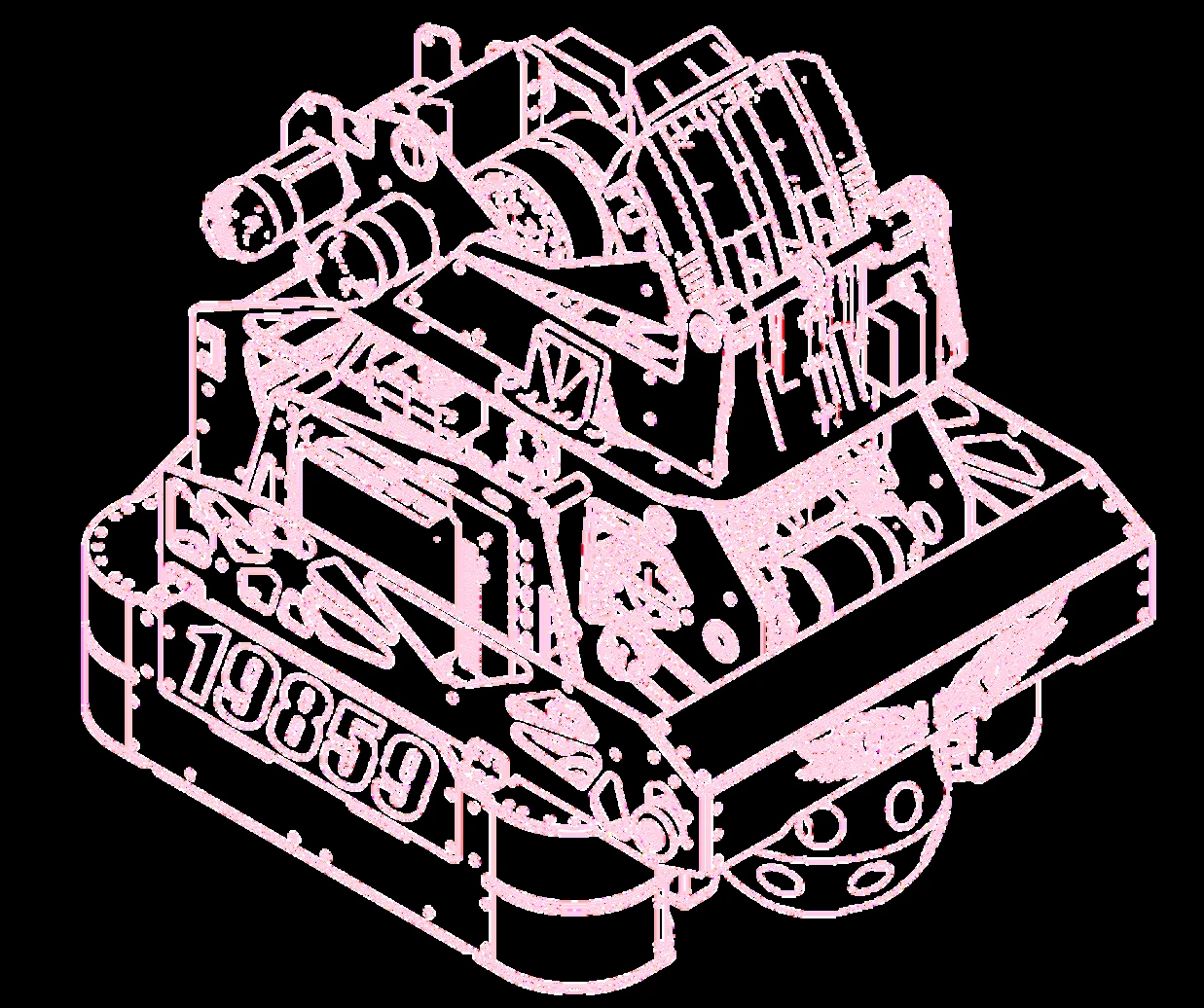
The robot, in the wild.